듀얼 소재 3D 프린팅으로 소프트 로봇용 공압 채널 제작하는 혁신 기술
하버드 연구팀이 개발한 듀얼 소재 3D 프린팅 기술로 소프트 로봇에 공압 채널을 직접 통합하는 방법을 소개합니다. 엘라스토머 소재와 용해성 잉크를 활용한 RM-3DP 기술의 원리와 응용 사례를 확인하세요.
3줄 요약
- Jackson K. Wilt 연구팀이 엘라스토머 소재와 용해성 잉크를 동시에 출력하는 듀얼 소재 3D 프린팅 기술을 개발했습니다.
- 출력 후 용해성 잉크를 제거하면 공압 채널이 생성되어 소프트 로봇에 움직임을 부여할 수 있습니다.
- 인간 손 모양의 그리퍼 등 복잡한 소프트 로봇 구조를 맞춤 제작할 수 있는 혁신적인 방법입니다.
📌 주요 내용
소프트 로봇의 공압 시스템 통합 문제 해결
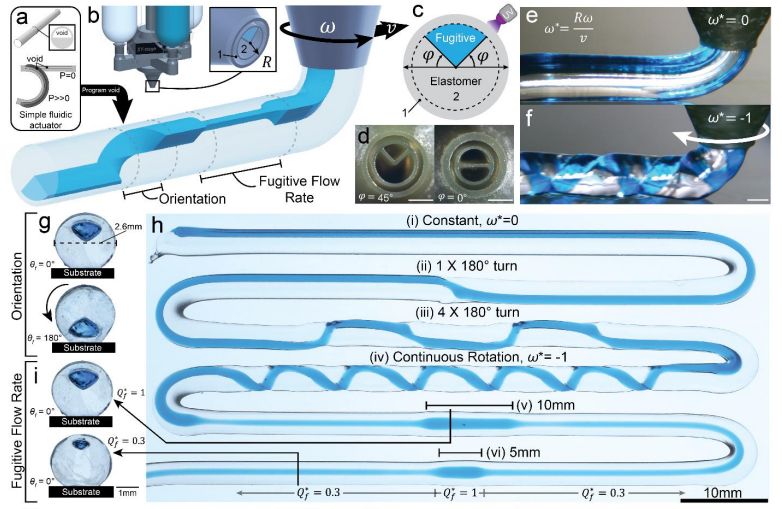
소프트 로봇 액추에이터에 움직임을 추가하는 일반적인 방법은 공압 시스템을 사용하는 것이지만, 이를 로봇에 통합하는 과정은 상당히 번거로운 작업입니다. Jackson K. Wilt 연구팀이 제시한 혁신적인 방법은 3D 프린팅을 활용하여 두 가지 소재를 동시에 압출하는 것입니다. 하나는 엘라스토머 소재이고, 다른 하나는 공압 채널을 생성하기 위한 용해성 잉크(fugitive ink)입니다. 프린팅 후 이 용해성 잉크를 용해시키면 압축 공기로 채울 수 있는 빈 채널이 남게 됩니다.
RM-3DP 기술의 원리와 소재
연구팀은 맞춤형 노즐을 사용한 합리적 다중 소재(RM-3DP, Rational Multi-material 3D Printing) 방식으로 이러한 소재들을 프린팅합니다. 이를 통해 다양한 채널 패턴을 생성할 수 있으며, 압축 공기가 엘라스토머 소재에 미치는 영향을 제어할 수 있습니다. 이 방식으로 힌지나 근육 같은 구조를 만들 수 있고, 이를 결합하여 더욱 복잡한 디자인을 구현할 수 있습니다.
시연에서 사용된 엘라스토머 소재는 광중합 가능한 폴리우레탄-아크릴레이트 수지이며, 용해성 잉크는 물에 30 wt%의 Pluronic F-127을 혼합한 것입니다. 원하는 패턴은 시뮬레이션을 통해 사전에 결정되며, 이후 프린팅과 엘라스토머 수지의 UV 경화 과정을 거칩니다.
인간형 손 그리퍼와 실용적 응용
연구팀이 시연한 디자인 중 하나는 인간의 손과 유사한 형태로, 손가락을 움직이고 물체를 잡을 수 있는 그리퍼입니다. 소프트 로봇 구현의 일반적인 특성상, 결과물은 큰 힘보다는 부드러운 접촉에 중점을 두고 있지만, 프린팅 공정의 높은 맞춤성 덕분에 흥미로운 인공 근육 디자인으로 활용될 수 있습니다.
기술적 세부 사항과 프로세스
이 기술은 다음과 같은 단계로 진행됩니다:
- 시뮬레이션: 원하는 움직임과 구조에 따라 공압 채널 패턴을 설계합니다.
- 듀얼 소재 프린팅: RM-3DP 방식으로 엘라스토머와 용해성 잉크를 동시에 출력합니다.
- UV 경화: 엘라스토머 수지를 자외선으로 경화시킵니다.
- 용해: Pluronic F-127 기반 용해성 잉크를 제거하여 공압 채널을 형성합니다.
- 공압 시스템 연결: 빈 채널에 압축 공기를 공급하여 움직임을 생성합니다.
👨💻 개발자에게 미치는 영향
소프트 로봇 개발의 패러다임 전환
이 기술은 소프트 로봇 개발자들에게 완전히 새로운 접근 방식을 제공합니다. 기존에는 공압 시스템을 수작업으로 통합해야 했지만, 이제는 3D 프린팅 단계에서 직접 채널을 생성할 수 있어 프로토타이핑 시간이 대폭 단축됩니다.
맞춤형 액추에이터 설계의 가능성
시뮬레이션 기반의 설계 프로세스는 개발자들이 특정 용도에 최적화된 액추에이터를 빠르게 제작할 수 있게 합니다. 의료용 보조 장치, 웨어러블 로봇, 섬세한 그리퍼 등 다양한 응용 분야에서 활용 가능성이 높습니다.
오픈소스 하드웨어와의 시너지
이러한 프린팅 기술은 오픈소스 3D 프린터를 개조하여 구현할 수 있는 가능성이 있어, 메이커 커뮤니티와 연구자들에게 접근성 높은 솔루션이 될 수 있습니다.